High-resolution, Real-time 3-D Shape Measurement for Particle Motion Capture
This project aims to study the methodology for capturing and measuring particles by means of a structured light based camera to create depth images and computer vision techniques to process these depth images for particle analysis.
Many CFD simulations are based on ideal conditions and assumptions. Measurements of physical parameters like wind speed, material weight etc. are all possible however at the end of the day they do not give us the results we expect. However basing multimillion dollar projects on simulations which may or may not be right is not ideal. Thus we introduce a new technique by which we can analyze experimentally how particles move in a real environment and verify simulations accordingly.
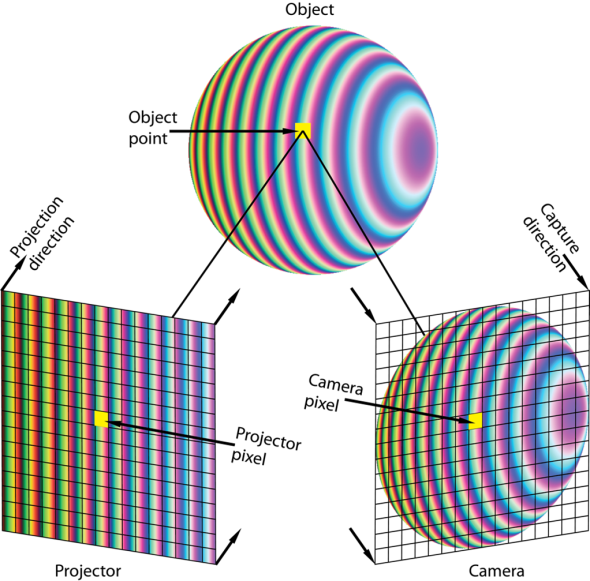
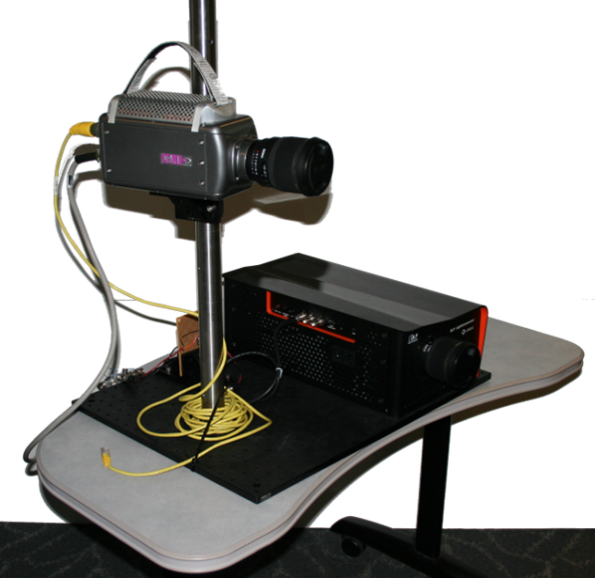
We have developed a camera based on structured light, where the deformation of the fringe patterns around an object allows for accurate calculations of depth.

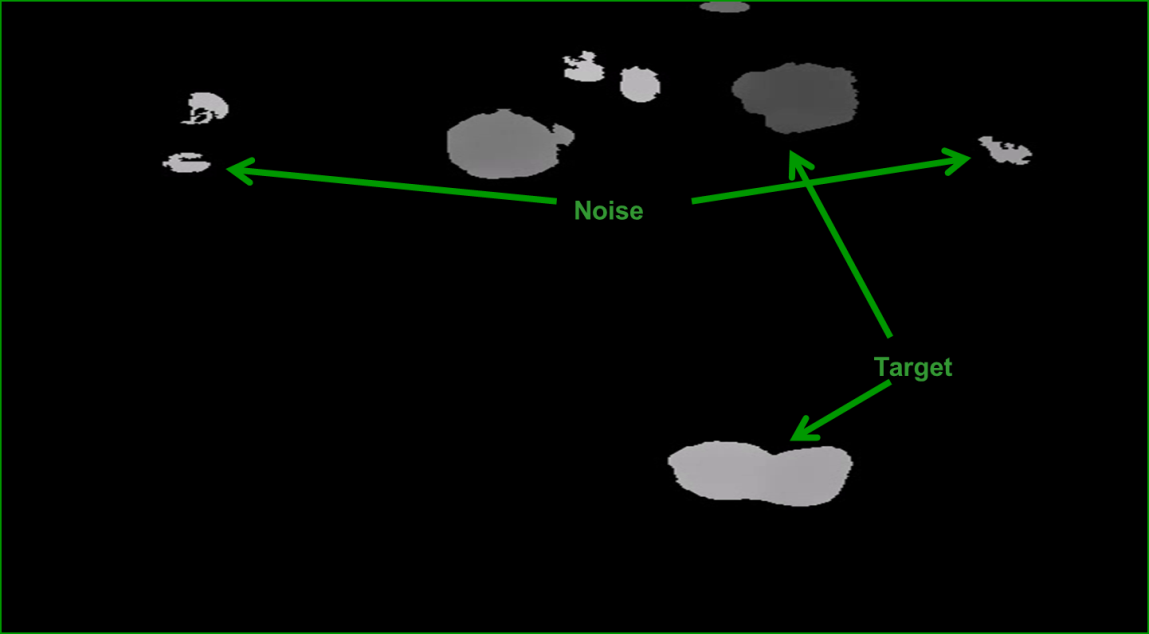
Being an optical device, they are noisy and are easily affected by other sources of light. This leads to artifacts in the data and inaccuracies in our calculations. We overcome these problems using the following method.
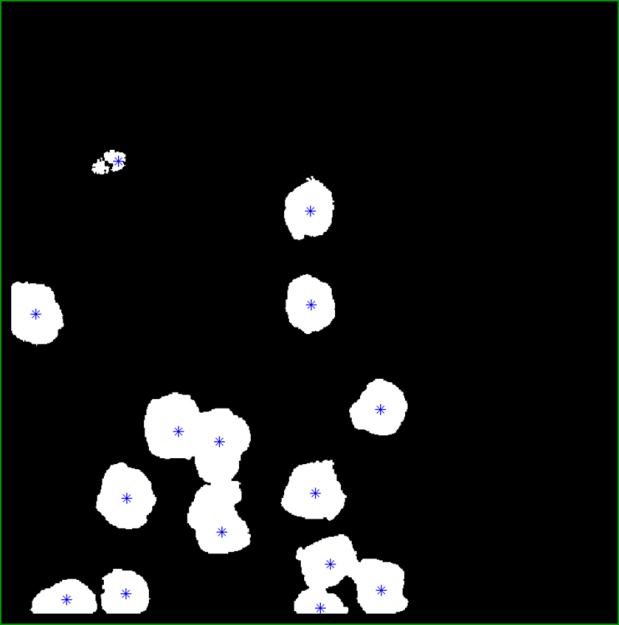
• Perform a series of erosion’s and dilation’s so that smaller artifacts get removed
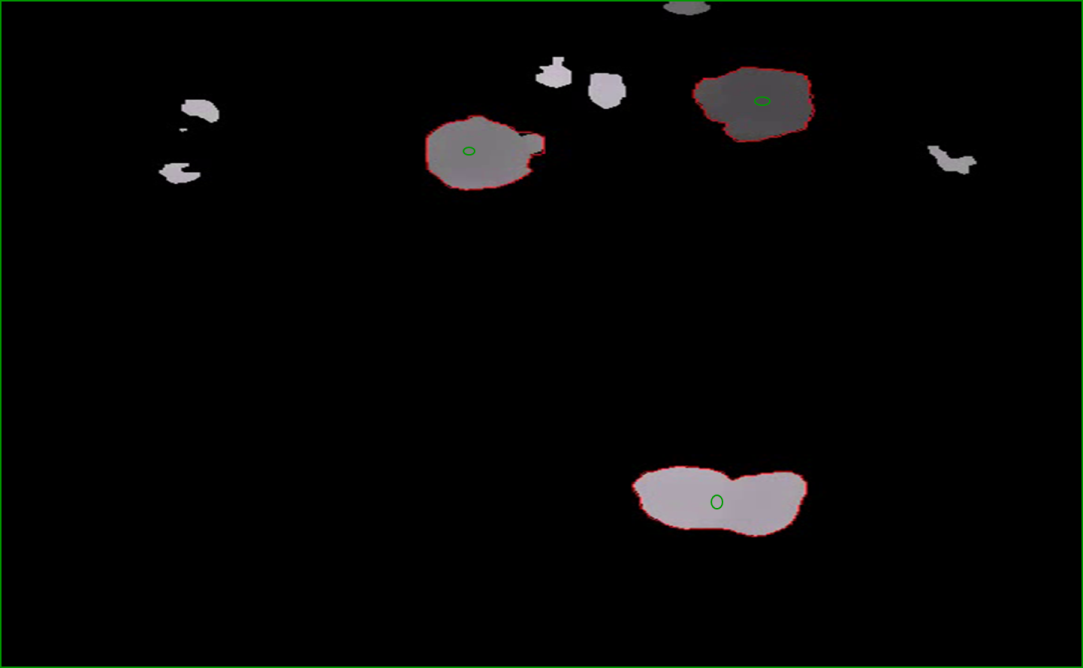
• Extract the boundaries of the various particles and remove any of them which are smaller than a particular threshold
The goal of this project is not just to detect the particles but to track their trajectories also. Particle tracking is a very hard problem as it has to overcome the primary issue of occlusions. For this we developed our own algorithm which is as follows
• Extract the centroids of each particle in each frame
• Using contours from the previous and current frame we determine the centroid position of each particle
• By essentially following each particle’s position we are able to trace out their trajectory
• Occlusions are dealt with by considering the “age” of a particle Particle’s age is replaced by newer particles closely matching position In the current frame. Younger contours are those which are visible while older ones are those which disappear. After a certain threshold age, the contour is assumed to be out of the frame.
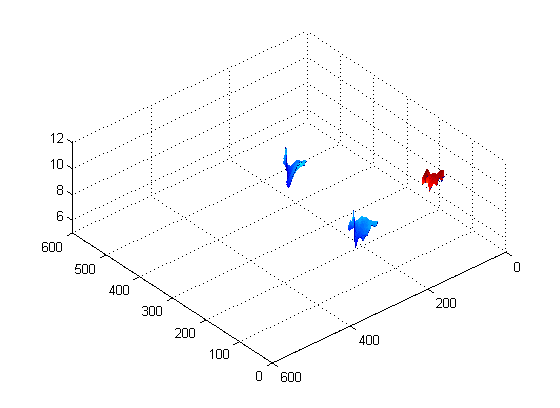
Using all the information we have with us we are able to make analyse and visualise the data in an immersive environment and bring about an understanding which is harder to realize through other forms of visualisations like charts and graphs.
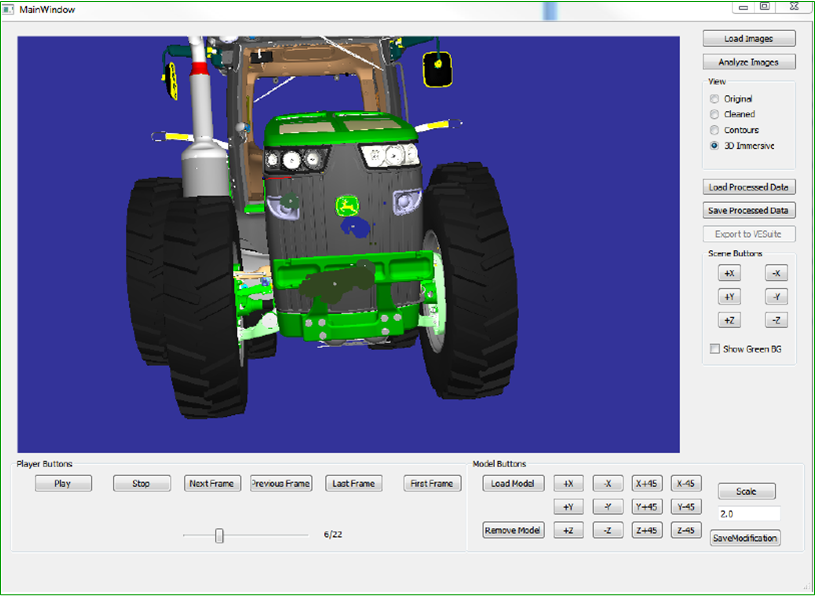
We show you an example of the data we captured and display it in front of a model tractor.
Future Work
Below is a rudimentary example of an algorithm we are developing to get the centroids of each particle even when they are stuck with other particles. With this we hope to develop better tracking algorithms and better particle analysis.