A takeaway from my time at this REU is to not conceive a research project as a linear progression from beginning to end. To explain why, I’m going to elaborate on what happened recently.
We printed several fingerprint molds using the resin printer, expecting to successfully fill it using silicone. On the first time we tried it, the silicone successfully cured, revealing the fingerprint texture as we removed it. However, we noticed a mistake that prevented us from using the fingerprints. Specifically, they were mirrored, meaning we had to re-print the resin molds. Once we poured silicone into the molds (twice!), the silicone stuck onto the mold, not curing, preventing us from getting fingerprint models.
I didn’t expect a lot of things:
- The exact timeline of our project: We began our project without much understanding or vision of what the final product was. It was only after halfway through the program (week 5-7) that the vision had formed; before then, we were either searching for background information or learning to use the software we would need to make our 3D models.
- The amount of prototypes we would need to find issues. We naturally noticed errors faster when we had the physical molds.
- How our silicone reacted with the resin mold. We don’t know the exact reason why the silicone didn’t cure the second and third times, but it might be because the first batch of molds were left out for longer, or there might have been a temperature and humidity difference.
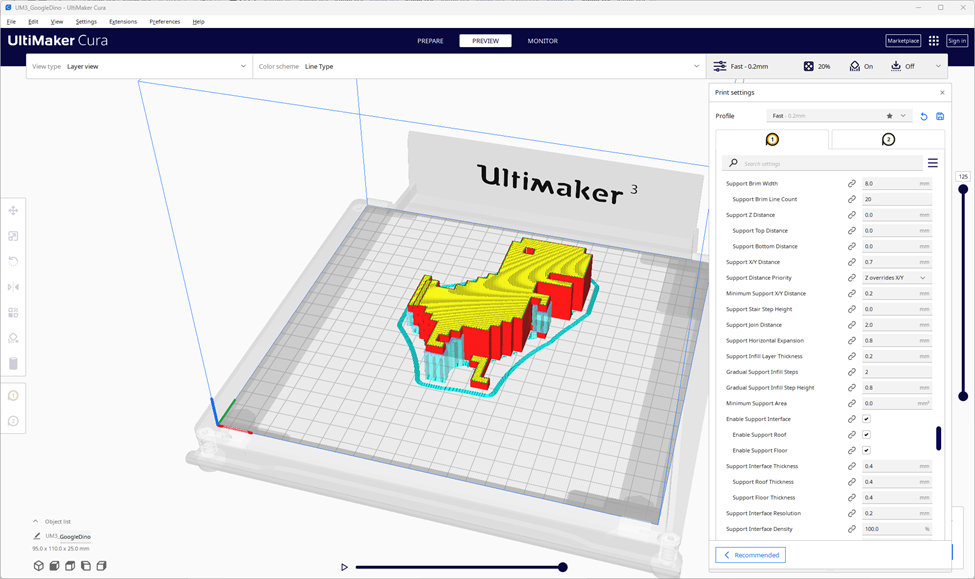
- How we needed to fit our 3D prints into the limited amount of time the room was open.
- Shipping delays, etc.
Because of all these issues piling up, I decided to talk to Stephen at lunch so I can reflect on how to better respond to these issues and anticipate them more proactively. The most salient idea he told me was that timelines for research projects are unlike those for any other project because they are more like a set of outcomes (like a decision tree?) with probabilities for each outcome instead of a single timeline. As a result, moving across a project is more like a sequence of taking planned risks rather than traveling across a predetermined path.
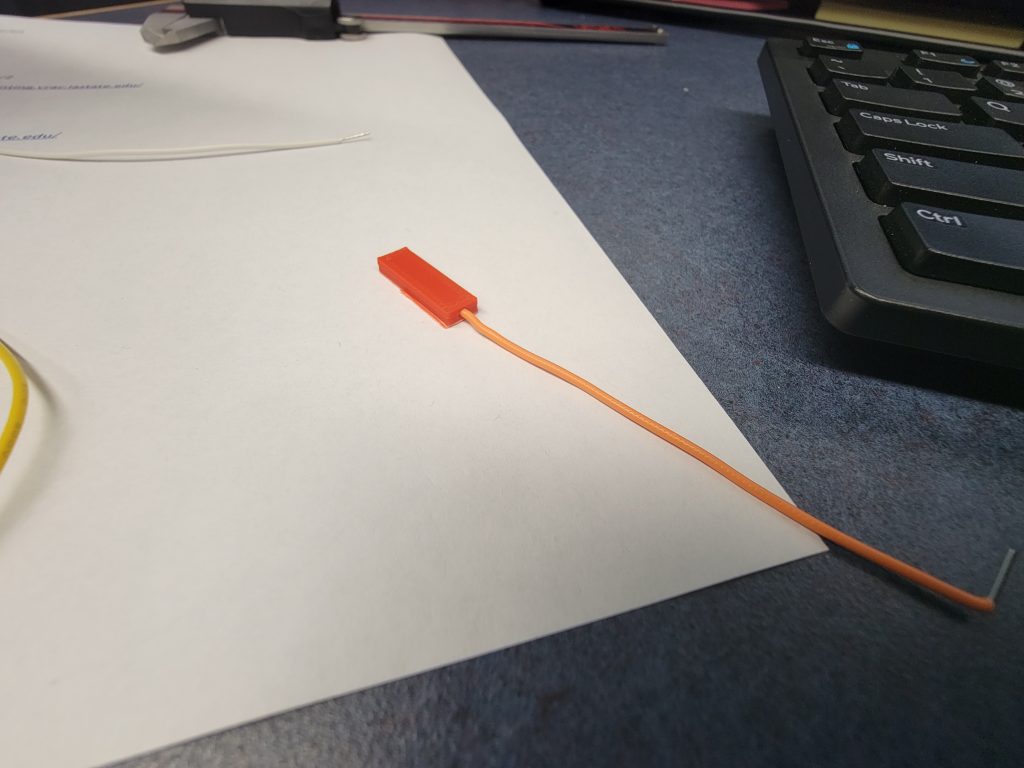
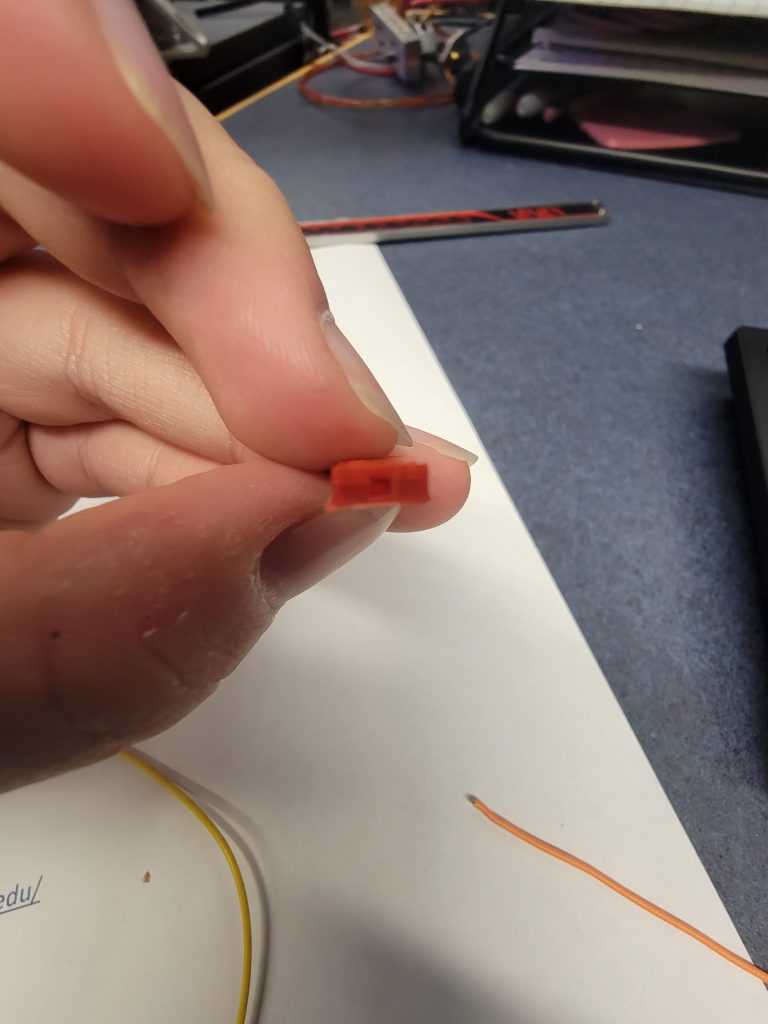
Thinking about this when I am writing this blog post, I recall one planned risk I took trying to make progress through our project. It happened right after our group realized that the fingerprint mold models were mirrored. After quickly mirroring the models again to un-mirror them, I devised a way to get the prints out ASAP by the end of Friday, even at the risk of the prints failing. The 3D printers were only available on Friday and Monday for 11 hours each day.
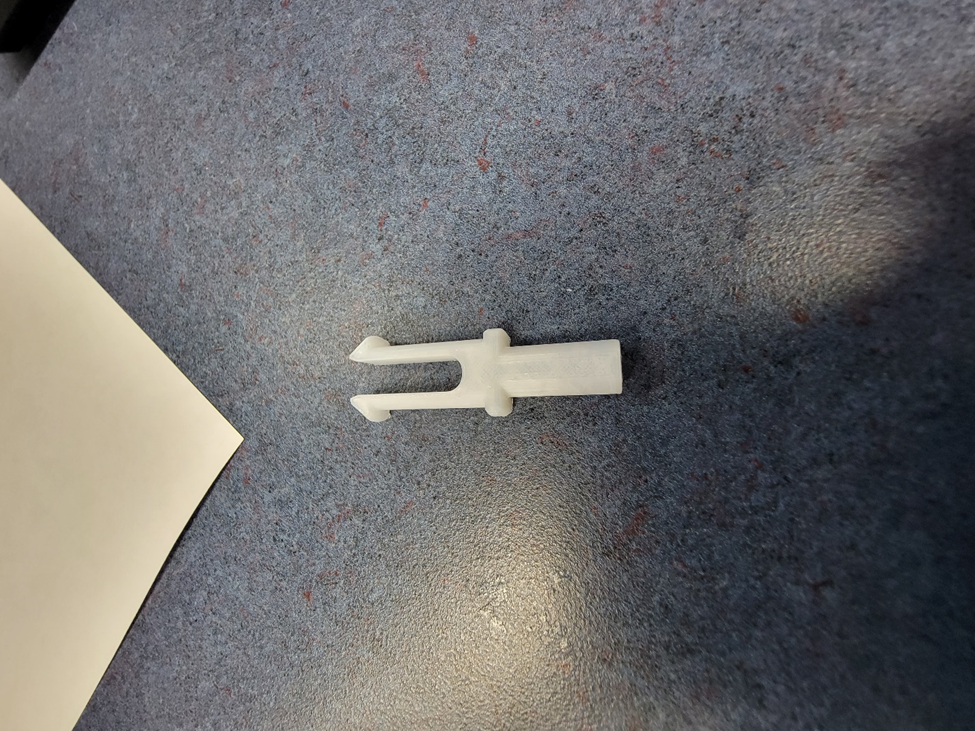
Instead of printing the whole set of molds as planned, I chose to print a subset in an orientation that would guarantee that the prints would finish in time. The orientations might have destroyed the textures of the fingerprints, but I decided to advance anyways because the next full batch of molds would have required me to wait until Monday regardless of the time I started printing it. Choosing to proceed meant that I could have gained, and if this failed, I would have lost nothing meaningful as the original plan would have led to a full batch of molds on Monday anyways.
Fortunately, the molds retained its shape well despite the orientation being risky, and we could pour the silicone the same Friday evening. Waiting over the weekend, the silicone still stuck to the resin molds, preventing us from proceeding. I felt a little disappointed, but retrospectively, this risk that I took ultimately led me and my group to better understand the appropriateness of the materials and procedures we used. Altogether, printing in a risky way, considering the time constraints I had, led us to experimenting a few days earlier than working as planned.
Research work ultimately has time limits: the deadline to submit a paper, the amount of funding one gets, the time left until a professor faces their tenure review, and so on. Thinking about timelines as a sequence of likely events feels comfortable given that time limits still exist. Yet linear timelines are stressful, as every last minute is one where I have to do the right thing or I will fall behind. Thinking about timelines as a tree of probabilities is challenging but tranquil at the same time. It keeps me mindful of the large ideas that I want to learn about, yet it enables me to live moment-to-moment, not writing the ending of a story at the beginning, but only writing a new cliffhanger at every ending.